Roboti i ri i Google DeepMind mund të luajë pingpong si një person
Sportet kanë shërbyer prej kohësh si një test i rëndësishëm për robotët. Shembulli më i njohur i fenomenit mund të jetë gara vjetore e futbollit RoboCup, e cila daton në mesin e viteve 1990. Tenisi i tavolinës ka luajtur një rol kyç në krahasimin e krahëve të robotëve që një dekadë më parë. Sporti kërkon shpejtësi, reagim dhe strategji, ndër të tjera.
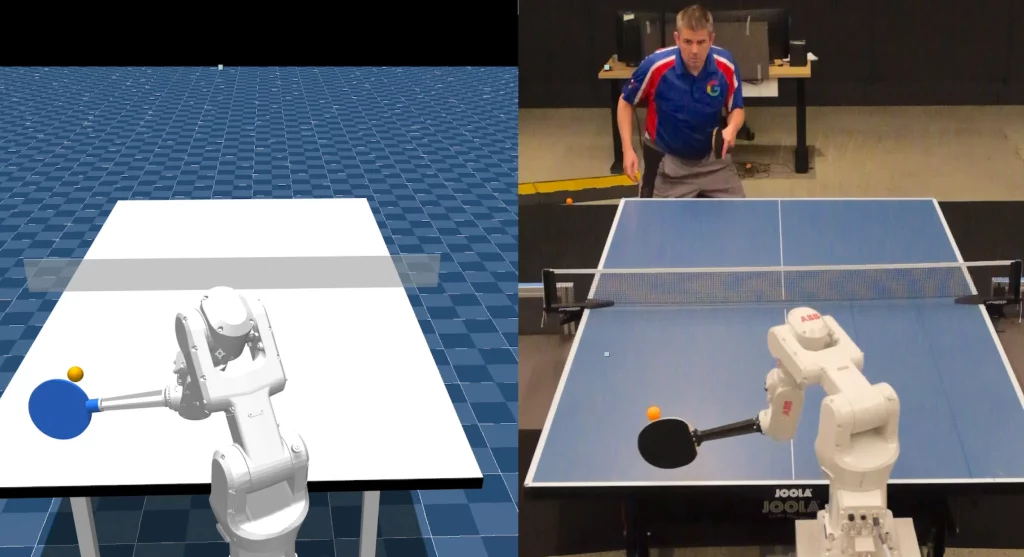
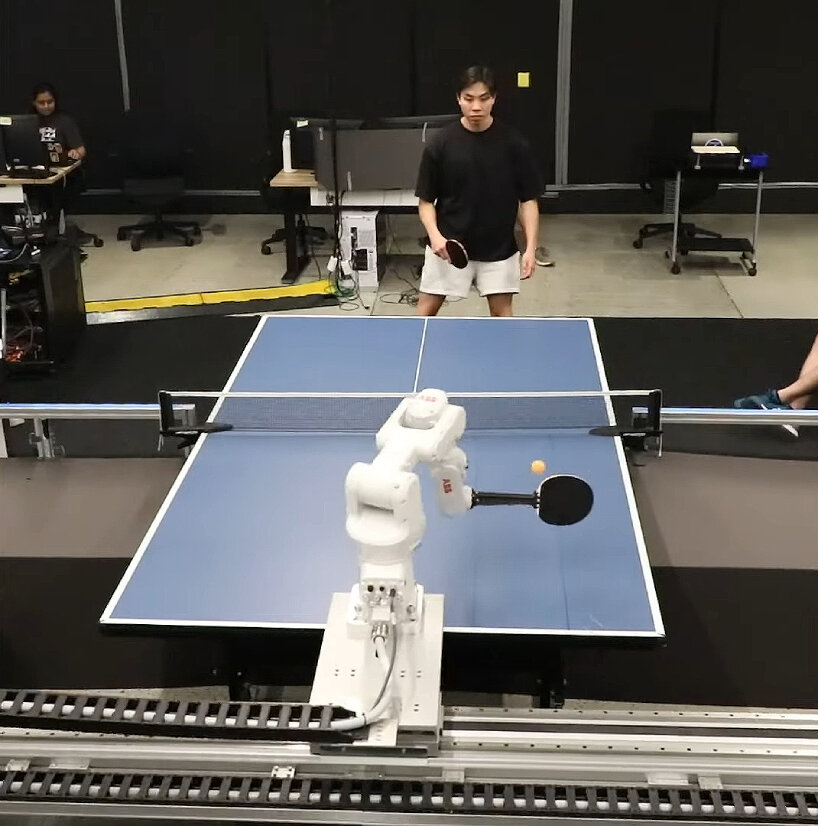
Në një punim të sapobotuar të titulluar “Arritja e pingpongut të robotëve konkurrues në nivel njerëzor”, ekipi i Google DeepMind Robotics po shfaq punën e vet në lojë. Studiuesit kanë zhvilluar në mënyrë efektive një “lojtar solidar amator të nivelit njerëzor” kur përballen me një komponent njerëzor.
Gjatë testimit, roboti i pingpongut ishte në gjendje të mundte të gjithë lojtarët e nivelit fillestar me të cilin përballej. Me lojtarë të ndërmjetëm, roboti fitoi 55% të ndeshjeve. Megjithatë, nuk është gati për të marrë pro. Roboti humbi sa herë që përballej me një lojtar të avancuar. Gjithsesi, sistemi fitoi 45% të 29 lojërave që luajti.
“Ky është agjenti i parë robot i aftë për të luajtur një sport me njerëzit në nivel njerëzor dhe përfaqëson një moment historik në mësimin dhe kontrollin e robotëve”, pohon gazeta. “Megjithatë, është gjithashtu vetëm një hap i vogël drejt një qëllimi afatgjatë në robotikë për arritjen e performancës së nivelit njerëzor në shumë aftësi të dobishme të botës reale. Mbetet shumë punë për të arritur vazhdimisht performancën e nivelit njerëzor në detyra të vetme, dhe më tej, në ndërtimin e robotëve gjeneralistë që janë të aftë të kryejnë shumë detyra të dobishme, duke ndërvepruar me shkathtësi dhe siguri me njerëzit në botën reale.
Mangësia më e madhe e sistemit është aftësia e tij për të reaguar ndaj topave të shpejtë. DeepMind sugjeron se arsyet kryesore për këtë janë vonesa e sistemit, rivendosjet e detyrueshme midis shkrepjeve dhe mungesa e të dhënave të dobishme.
“Për të adresuar kufizimet e vonesës që pengojnë kohën e reagimit të robotit ndaj topave të shpejtë, ne propozojmë hetimin e algoritmeve të avancuara të kontrollit dhe optimizimeve të harduerit,” vënë në dukje studiuesit. “Këto mund të përfshijnë eksplorimin e modeleve parashikuese për të parashikuar trajektoret e topit ose zbatimin e protokolleve më të shpejta të komunikimit midis sensorëve dhe aktivizuesve të robotit.”
Probleme të tjera të shfrytëzueshme me sistemin janë topat e lartë dhe të ulët, prapavija dhe aftësia për të lexuar rrotullimin në një top në hyrje.
Për sa i përket mënyrës se si një hulumtim i tillë mund të ndikojë në robotikë përtej dobisë shumë të kufizuar të pingpongut, DeepMind citon arkitekturën e politikave, përdorimin e saj të simulimit për të vepruar në lojëra reale dhe aftësinë e saj për të përshtatur strategjinë e saj në kohë reale.