Roboti bionik i Kinës riprodhon lëvizjen e gepardit me teknologji inovative të materialeve

Roboticistët dhe shkencëtarët kompjuterikë kanë krijuar një sërë sistemesh të frymëzuara nga njerëzit dhe kafshët. Roboti i fundit, i prezantuar në një punim të botuar në Journal of Bionic Engineering, është projektuar duke përdorur materiale piezoelektrike një klasë materialesh që gjenerojnë një ngarkesë elektrike kur ekspozohen ndaj stresit mekanik.
Roboti piezoelektrik arrin lëvizje lineare, lëvizje kthese dhe lëvizje kthese me rreze të ndryshme duke përdorur një metodë drejtimi diferenciale të tensionit. U ndërtua një prototip, me peshë 38 gram dhe me përmasa 150 × 80 × 31 mm³, shpjeguan studiuesit.
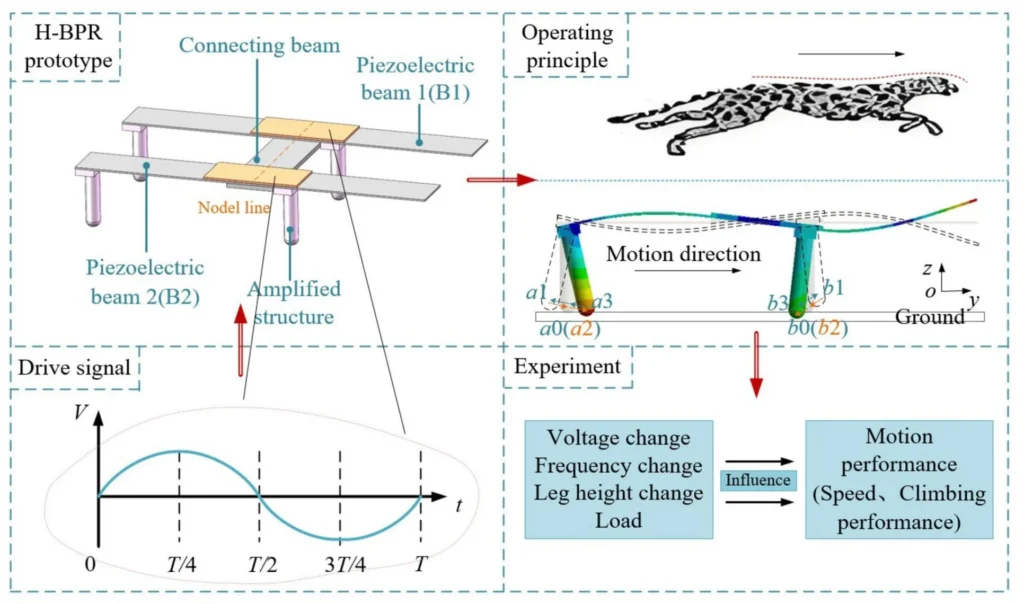
Roboti i ri piezoelektrik bionik në formë H (H-BPR) përbëhet nga katër këmbë të lidhura me tre rreze piezoelektrike. Duke shfrytëzuar dridhjet e përkuljes së rrezeve piezoelektrike, roboti imiton lëvizjet periodike të këmbëve të ecjes së vrapimit të një cheetah.
Studiuesit analizuan dinamikën dhe kinematikën e robotit piezoelektrik për të përcaktuar trajektoren e një pike në fund të këmbës së robotit. Më pas ata ekzaminuan parimet e lëvizjes së robotit, të ndjekura nga analizat e përgjigjes modale dhe harmonike duke përdorur softuerin e analizës së elementeve të fundme.
“Rezultatet e testit të performancës tregojnë se roboti piezoelektrik ka një shpejtësi maksimale prej 66,79 mm/s në një tension ngacmimi prej 320 V dhe një kapacitet ngarkese prej 55 g. Për më tepër, H-BPR me këmbë të pabarabarta lëvizëse ka performancë më të mirë në ngjitje, dhe përfundimet e marra janë informuese për zgjedhjen e lartësive të këmbëve për robotët piezoelektrikë, “shkruan studiuesit në abstrakt.
Ndryshe nga robotët e tjerë që mbështeten në valët e materialeve piezoelektrike për lëvizje, sistemi i ri i zhvilluar nga këta studiues ka një dizajn më të thjeshtë, duke e bërë atë potencialisht më të lehtë për t’u fabrikuar. Për më tepër, ai ofron një gamë më të gjerë lëvizjesh, pasi lëvizja dhe rrezja e rrotullimit mund të rregullohen duke ndryshuar tensionin e aplikuar.
Studiuesit dhe kolegët e tyre kanë zhvilluar një prototip bazë të robotit, i aftë për të mbajtur ngarkesa të vogla. Në të ardhmen, dizajni mund të përshtatet për të inkorporuar sensorë ose kamera miniaturë, duke zgjeruar funksionalitetin e robotit.
Në një seri eksperimentesh në botën reale, prototipi i zhvilluar nga ekipi tregoi rezultate premtuese. Roboti përsëriti në mënyrë efektive ecjen e vrapimit të cheetahs dhe demonstroi aftësinë për të ngjitur rampat me prirje të ndryshme.
Ky sistem robotik inovativ i zhvilluar nga ekipi hulumtues mund të çojë në krijimin e robotëve të ngjashëm duke përdorur materiale piezoelektrike. Duke parë përpara, ekipi synon të përmirësojë dizajnin e robotit për të mundësuar funksionimin efektiv në temperatura ekstreme, klima të ashpra ose mjedise të rrezikshme, duke e bërë atë ideal për përdorim industrial ose misione kërkimi dhe shpëtimi.
Një zbulim i ngjashëm vitin e kaluar pa studiuesit në Universitetin e Teknologjisë të Queensland (QUT) të eksplorojnë se si truri i kafshëve lundron për të krijuar sisteme robotike më efikase. Kafshët, të mëdha dhe të vogla, janë të afta të lëvizin nëpër mjedise të ndryshme, nga pyjet në shkretëtirë. Udhëhequr nga Somayeh Hussaini, ekipi zhvilloi një sistem të ri navigimi që merr frymëzim nga mënyra se si truri i kafshëve përpunon informacionin, duke synuar të përmirësojë efikasitetin e navigimit robotik.