Roboti vetë-mësues imiton njerëzit, pastron lavamanët, kryen detyra të shumta
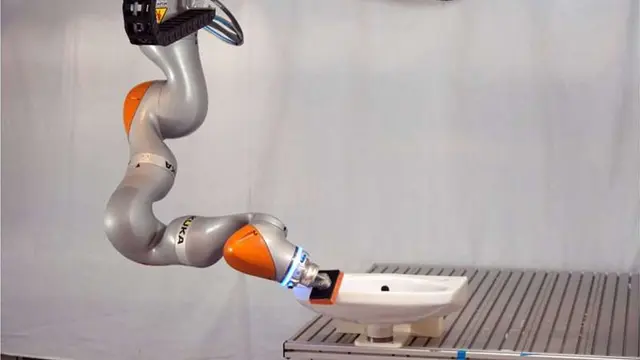
Falë studiuesve në TU Wein në Vjenë, premtimi i robotëve për pastrimin e shtëpive është një hap më afër. Ekipi ka zhvilluar një robot vetë-mësues për të imituar njerëzit për të kryer detyra të thjeshta si pastrimi i lavamanëve.
Ndërsa kjo mund të duket e zakonshme, zhvillimi është shumë domethënës pasi kodimi i vështirë i një roboti për të lëvizur një sfungjer mbi skajet komplekse të lakuar të një lavaman do të ishte një detyrë monumentale. Për këtë qëllim, ekipi hulumtues gjeti një hak duke përzier vëzhgimin me të dhënat prekëse nga mësuesit njerëz për të trajnuar robotët për të kopjuar të njëjtën detyrë.

Ky zhvillim nuk do të ketë aplikime vetëm në shtëpi. I njëjti proces mësimor mund të zbatohet lehtësisht për shumë detyra të tjera në industri, si lustrimi i sipërfaqeve, lyerja, lëmimi ose aplikimi i ngjitësve.
“Kapja e formës gjeometrike të një lavaman me kamera është relativisht e thjeshtë,” thotë profesor Andreas Kugi nga Instituti i Automatizimit dhe Kontrollit në TU Wien. “Por ky nuk është hapi vendimtar. Është shumë më e vështirë t’i mësosh robotit se çfarë lloj lëvizjeje kërkohet për cilën pjesë të sipërfaqes. Sa shpejt duhet të jetë lëvizja? Cili është këndi i duhur? Cila është sasia e duhur e forcës?” shtoi ai.
Kjo është e njëjta mënyrë që qeniet njerëzore mësojnë detyra të reja, veçanërisht aftësi si zanatet.
“Në një seminar, dikush mund të shikojë mbi supin e nxënësit dhe të thotë: Duhet të shtypësh pak më shumë në atë skaj të ngushtë,” thotë Christian Hartl-Nesic, kreu i grupit të Robotikës Industriale në ekipin e Andreas Kugi. “Ne donim të gjenim një mënyrë për ta lënë robotin të mësonte [në mënyrë të ngjashme],” shtoi ai.
Siç u përmend më parë, ekipi e bëri këtë duke zhvilluar një mjet të veçantë pastrimi për të ndihmuar në mësimin e robotit; një sfungjer i ngopur me sensor. Duke përdorur këtë, “mësuesit” njerëzorë përdorën sfungjerin me sensorë të forcës dhe shënues gjurmues për të pastruar në mënyrë të përsëritur skajin e përparmë të një lavaman.
“Ne gjenerojmë një sasi të madhe të dhënash nga vetëm disa demonstrime, të cilat më pas përpunohen për të ndihmuar robotin të kuptojë se çfarë kërkon pastrimi i duhur,” shpjegon Christian Hartl-Nesic.
Duke përdorur këto të dhëna, ekipi përdori një strategji inovative të përpunimit të të dhënave të zhvilluar nga ekipi kërkimor në TU Wien për të mundësuar procesin e të mësuarit.
Fillimisht, të dhënat e matjes përpunohen statistikisht dhe rezultatet përdoren për të trajnuar një rrjet nervor për të njohur elementët e lëvizjes së paracaktuar, të njohur si “primitivë të lëvizjes”.
Ky algoritëm i avancuar i të mësuarit më pas lejon robotin të pastrojë në mënyrë efektive të gjithë lavamanin ose objekte të tjera me sipërfaqe komplekse pas stërvitjes, edhe pasi të jetë treguar vetëm se si të pastrohet një skaj i vetëm i lavamanit!
“Roboti mëson se ju duhet ta mbani sfungjerin ndryshe në varësi të formës së sipërfaqes, se duhet të aplikoni një sasi të ndryshme force në një zonë të lakuar fort sesa në një sipërfaqe të sheshtë,” shpjegon Ph.D. studenti Christoph Unger nga grupi i Robotikës Industriale.
Në të ardhmen, roboti mund të montohet në një platformë celulare, duke e lejuar atë të shërbejë si një asistent i vlefshëm në çdo mjedis të seminarit. Dhe ashtu si njerëzit e aftë dhe me përvojë, këta robotë gjithashtu mund të “transmetojnë atë që kanë mësuar” te robotët e tjerë.
“Le të imagjinojmë se shumë punëtori përdorin këta robotë që mësojnë vetë për të lyer ose lyer sipërfaqet. Më pas, mund t’i lini robotët të fitojnë përvojë individualisht me të dhënat lokale. Megjithatë, të gjithë robotët mund të ndajnë parametrat që mësuan me njëri-tjetrin”, thotë Andreas Kugi.