Waymo përdor Genie 3 të Google DeepMind për të simuluar skenarë drejtimi që makinat e saj nuk i kanë hasur kurrë
Waymo ka zbuluar një model simulimi gjenerues për drejtimin autonom të ndërtuar mbi Genie 3 të Google DeepMind. Sistemi krijon skenarë hiperrealistë nga takimet me elefantë te tornadot që do të ishin pothuajse të pamundura për t’u kapur në botën reale në shkallë të gjerë.

Operatori i robotëve Waymo ka prezantuar Waymo World Model, një model botëror gjenerues për simulimin e situatave të drejtimit autonom. Ai bazohet në Genie 3, të cilin Google Deepmind e quan modelin e tij më të përparuar të përgjithshëm të botës, i përshtatur posaçërisht për trafikun rrugor.
“Njohuritë e forta botërore të Genie 3, të fituara përmes trajnimit paraprak në një grup videosh jashtëzakonisht të madh dhe të larmishëm, na lejojnë të eksplorojmë situata që nuk janë vëzhguar kurrë drejtpërdrejt nga flota jonë”, shkruan Waymo.
Waymo e sheh simulimin si një nga tre shtyllat kryesore të qasjes së saj ndaj sigurisë. Waymo Driver ka regjistruar gati 200 milionë milje plotësisht autonome deri më tani, por grumbullon miliarda milje në botë virtuale përpara se të përballet me skenarë në rrugët publike, thotë kompania.
Waymo argumenton se simulimi i skenarëve të rrallë e përgatit më mirë Waymo Driver për situata komplekse. Megjithatë, kompania nuk ndau asnjë rezultat referues ose vlerësim të pavarur në njoftimin e saj.
Sipas Waymo-s, shumica e modeleve të simulimit në industri trajnohen vetëm në të dhënat e drejtimit të vetë kompanisë, gjë që e kufizon sistemin në përvojën e drejtpërdrejtë të asaj kompanie. Modeli Botëror Waymo mbështetet në njohuritë e gjera të botës që Genie 3 mblodhi përmes trajnimit paraprak në një grup të dhënash video masive dhe të larmishme.
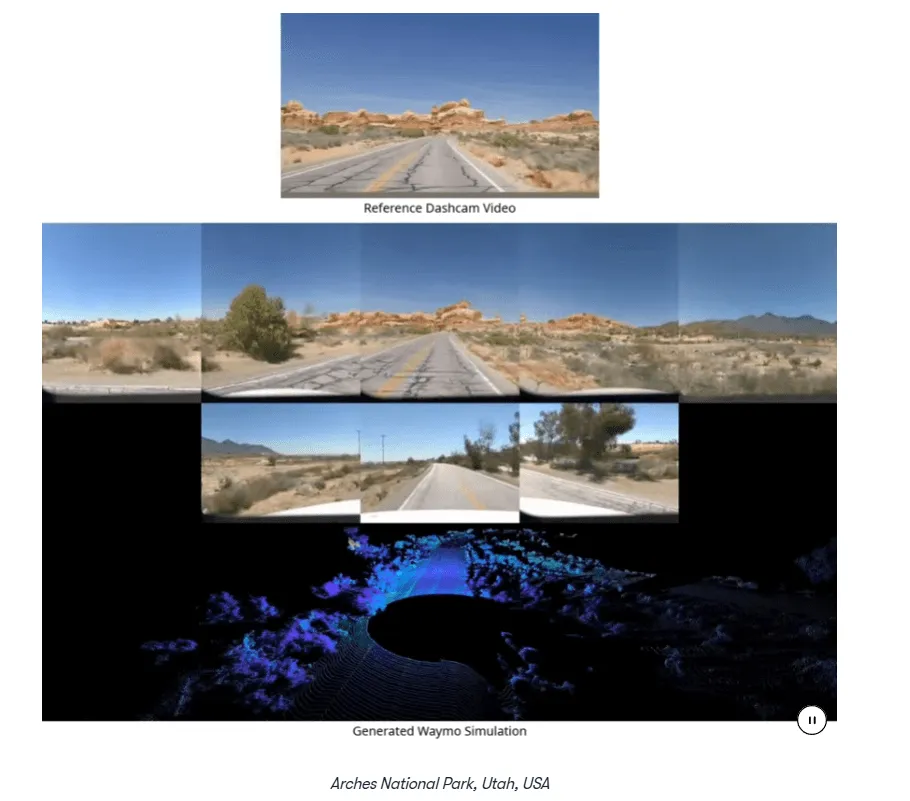
Përmes trajnimit të specializuar pas trajnimit, kjo njohuri video 2D përkthehet në rezultate lidar 3D të përshtatura sipas pajisjeve të patentuara të Waymo-s. Modeli gjeneron të dhëna si të kamerës ashtu edhe të lidarit – kamerat ofrojnë detaje vizuale ndërsa lidari ofron informacion të saktë të thellësisë si një sinjal plotësues.
Kjo i lejon sistemit të simulojë situata që flota e Waymo nuk i ka parë kurrë në të vërtetë, si një takim me një elefant, një tornado, një zonë banimi të përmbytur ose borë në rrugë tropikale të rrethuara me palma.
Modeli Botëror Waymo ofron tre mënyra për të kontrolluar simulimet. Kontrolli i veprimit të drejtimit i lejon inxhinierët të testojnë skenarë kundërfaktikë, për shembull, nëse Waymo Driver mund ta kishte trajtuar një situatë ndryshe. Ndryshe nga metodat rindërtuese si splat-et 3D Gaussian, të cilat shpërbëhen vizualisht kur rrugët devijojnë, modeli gjenerues i mban gjërat realiste dhe të qëndrueshme, pohon Waymo.
Kontrolli i paraqitjes së skenës rregullon paraqitjet e rrugëve, kushtet e semaforëve dhe mënyrën se si sillen përdoruesit e tjerë të rrugës. Kërkesat me tekst ofrojnë fleksibilitetin më të madh: ato mund të gjenerojnë kohë të ndryshme të ditës, kushte moti ose skena tërësisht sintetike. Modeli gjithashtu mund të konvertojë videot e zakonshme të kamerave të makinës ose të telefonit celular në simulime multimodale që tregojnë se si Waymo Driver do ta perceptonte një skenë me sensorët e tij.
Për skenarë që zgjasin më shumë, si për shembull kalimi në një korsi të ngushtë, Waymo ndërtoi një version më të hollë të modelit që thotë se arrin një “reduktim dramatik të llogaritjes” dhe mundëson simulime në shkallë të gjerë.